Precise Maneuver (PM)
Currently is looking for translators. [See details]
Default Controls
Prograde +/-: Keypad 8/Keypad 5
Normal +/-: Keypad 9/Keypad 7
Radial +/-: Keypad 6/Keypad 4
Time +/-: Keypad 3/Keypad 1
Increment +/-: Keypad 0/(alt/option) + <Increment +>
Change Conics: Keypad Enter
Hide Node Editor Window: P
Open Node: O
(https://forum.kerbalspaceprogram.com/index.php?/topic/128303-12x-precise-maneuver-editor/&do=findComment&comment=3070099).
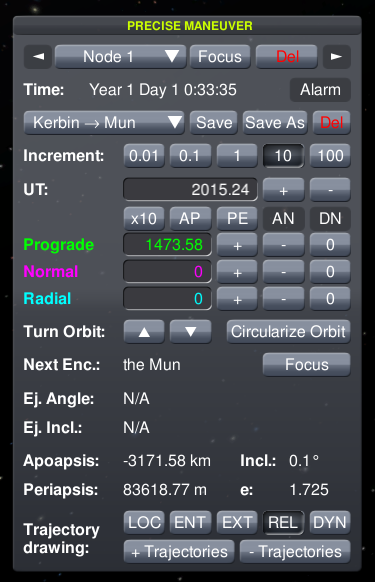
If you were ever frustrated with the default maneuver UI, don’t be! With this plugin you can edit your maneuvers precisely, and always get the desired result. In the current version of the plugin you can choose the tools you need from the wide assortment of modules, and customize it for yourself. Here is the list of available modules:
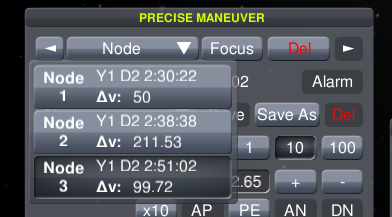
Maneuver Pager
allows to switch between maneuvers, focus on the current maneuver and delete it. It works as a dropdown list and shows the maneuver’s full deltaV and time:
Maneuver Presets
allows to save and load the parameters of the maneuver. It also suggests the name for the preset based on the current position and the next encounter.

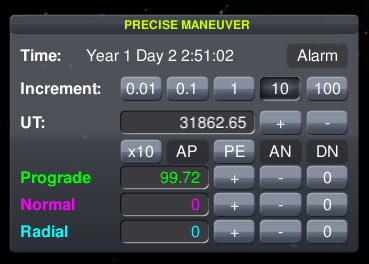
Precise Input
allows to change the current maneuver precisely by the use of “+” and “-“ buttons. Also allows to move the maneuver to apoapsis, periapsis, etc.
Orbit Tools
allows to turn the orbit in normal/antinormal direction for a precise angle, to circularize the orbit, and to copy/paste the maneuver. The copy/paste format is similar to the Transfer Window Planner, and the maneuver can be pasted from it.
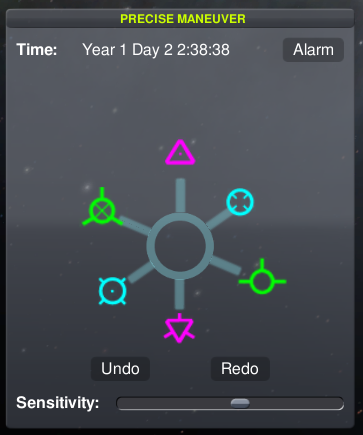
Maneuver Gizmo
is the maneuver gizmo that looks very similar to the stock gizmo, and behaves in a similar way. The sensitivity of the gizmo is adjustable
Next Encounter
shows the next encounter, allows to focus on it and shows the distance to it in the closest point (PE)
Ejection angles
shows the ejection parameters in case the orbit escapes from the SOI of the celestial body
Orbit Info
shows the parameters of the planned orbit
Patches Control
allows to change the mode of Patched Conics draw, i.e. the trajectories of the vessel